课程简介
本课程将带领学生学习如何控制智能小车完成一个正方形移动的任务,了解汽车转弯的基本原理。
视频:智能小车方形移动讲解
目录
- 知识点
- 学习任务
- 搭建
- 编程
一、知识点
汽车转弯的原理是什么?
为了能够让车辆实现正常的转弯,车辆在后轮轮轴上安装了差速器,如此靠近圆心处的轮胎转速更慢,远离圆心处的轮胎转速更快,就可以顺利完成转弯了。
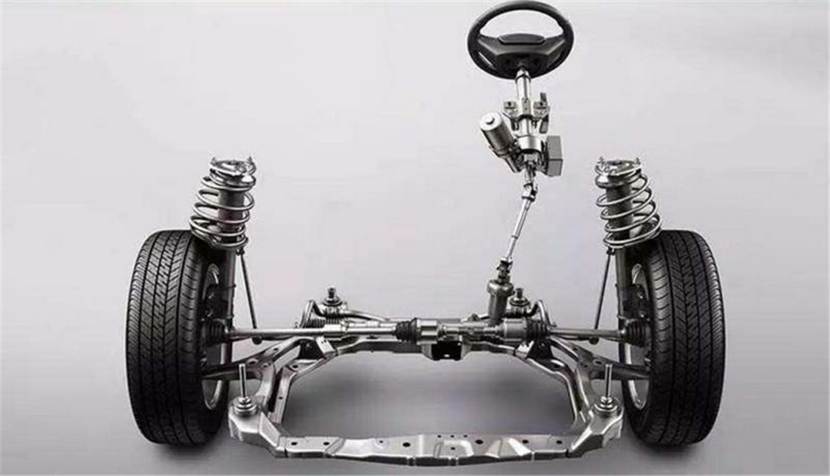
图1 汽车转向系统
二、学习任务
搭建一个车的模型,应用程序控制小车走一个正方形形状。
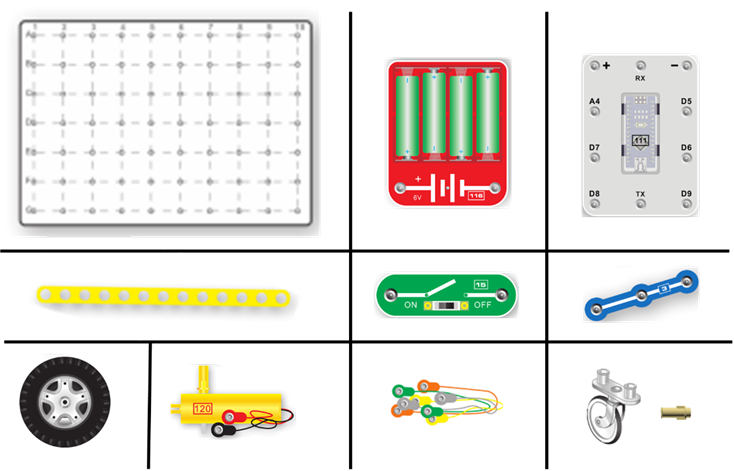
图2 实验材料图
三、搭建
1. 实验材料
arduino主控板模块、电池盒、连杆、支撑轮、底板、轮子、车轮卡扣、齿轮马达、开关、软硬导线
2. 实际搭建图
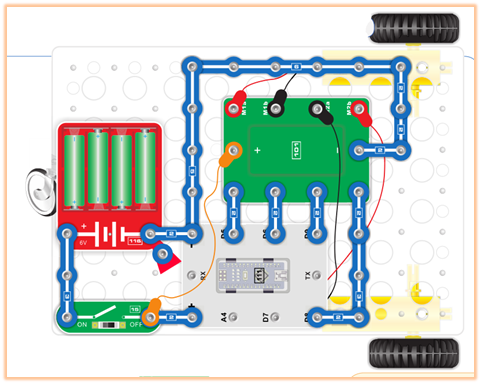
图3 搭建图
四、编程
1. 流程
- 自定义引脚及变量
- 自定义直行、转弯及停止等函数
- 循环(4次):直行一段时间-转弯90°
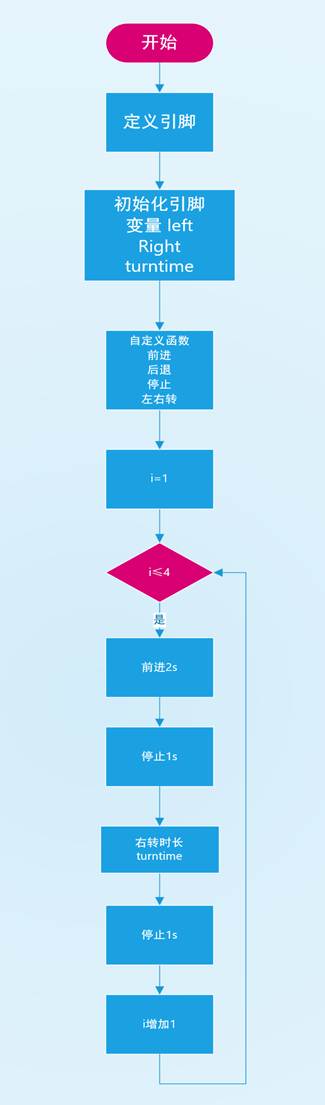
图4 流程图
2. IDE编程
程序要点:
- 自定义函数:停止:四引脚低电平 前进:两高两低 后退:两低两高 转弯(左转或右转)
- Setup(初始化函数)中编写定义引脚模式及变量
- 循环(4次):运行直行函数-延时-停止函数-转弯函数-延时-停止
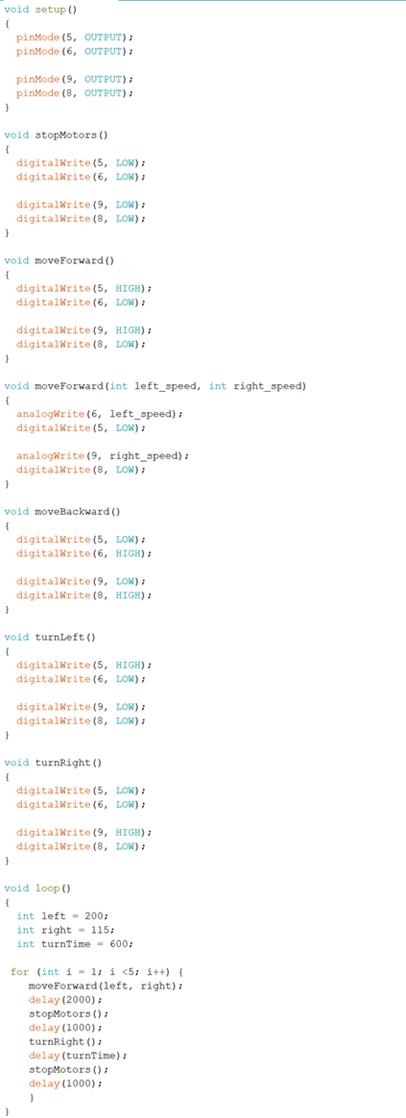
图5 IDE程序截图
3. 米思奇编程
程序要点:
- 自定义函数:停止:四引脚低电平 前进:两高两低 后退:两低两高 转弯(左转或右转)
- Setup(初始化函数)中编写定义引脚模式及变量
- 循环(4次):运行直行函数-延时-停止函数-转弯函数-延时-停止

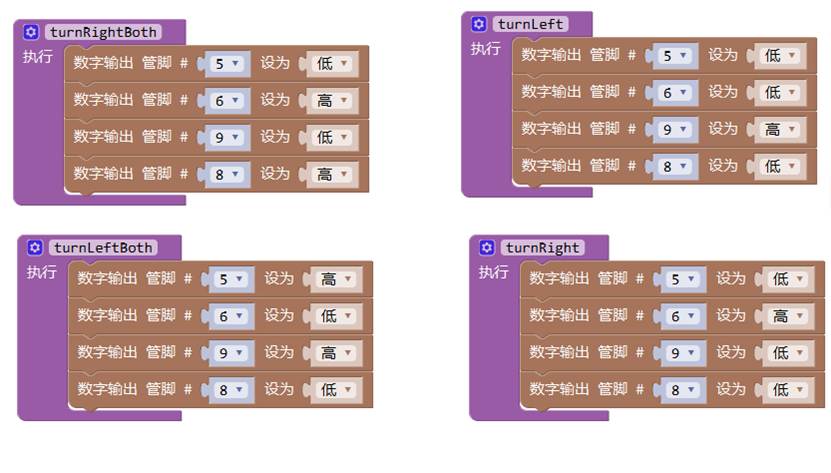
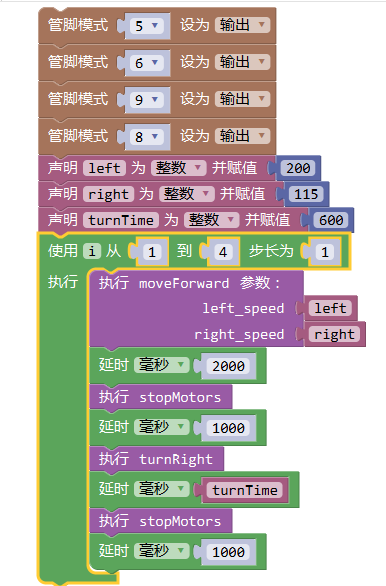
图6 米思奇程序截图